
CDC 2023 Lunch Sessions
CDC 2023 has the following five Lunch Sessions. Click the buttons below to download the session slides.
13 Dec, 12:15-13:15: Control for climate change: empower a billion lives
Date & Time: 13 Dec, 12:15-13:15
Venue: Orchid Main 4202-4306
Chair: Hideaki Ishii 
Program:
- Introduction by Anuradha Annaswamy

- Team Green Empowerment presentation
- Team Nanoe/G2Elab presentation

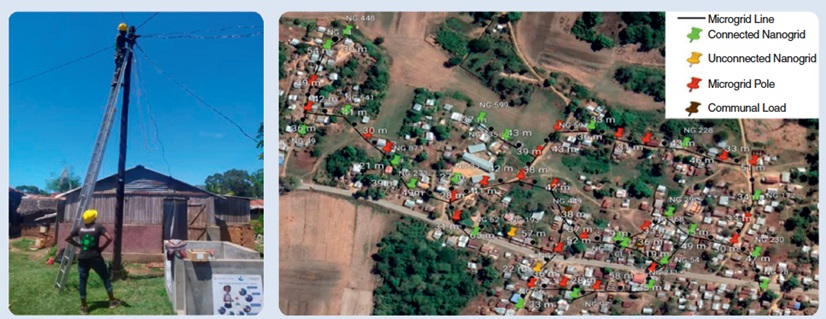
Project Nanoe, EBL II Grand Prize Winner, March 2023
- Q&A
Empower a Billion Lives II is a competition to help communities in energy poverty by developing economical and scalable solutions for energy access based on nanogrids, solar home systems, improved business models, and so on. More than 200 teams participated from all over the world. IEEE CSS was one of the main sponsors, with the aim to promote solutions enabled by automation. At this lunch session, members of two winning teams will present their developments.
13 Dec, 12:15-13:15: Sanjoy Mitter memorial session
Date & Time: 13 Dec, 12:15-13:15
Venue: Melati Main 4001AB-4104
Chairs: Munther Dahleh  Ali Jadbabaie
Ali Jadbabaie 
Honoring the Memory of Sanjoy Mitter
Join us for a heartfelt gathering at the CDC as we pay tribute to the cherished memory of Sanjoy Mitter, a revered mentor, a leader, and influential figure in our community, who left us this year. Several esteemed speakers, intimately familiar with Sanjoy's remarkable journey, will be sharing poignant 4-5-minute anecdotes highlighting his profound impact on our field. Time permitting, there will be an opportunity for brief remarks from attendees as well.

Sanjoy Mitter (1933~2023)
14 Dec, 12:15-13:15: Can GPT design your controller?
Date & Time: 14 Dec, 12:15-13:15
Venue: Orchid Main 4202-4306
Chair: George Pappas 
Can GPT design your controller and prove that it is safe? Can it create homework problems for your control class? Can we control GPT? What are the implications of tools like GPT have for control research and education? In this blue sky session, we will have a panel discussion with the community about the opportunities, challenges, but also the implications of foundation models (like GPT) in control systems research and education. The panel will include Magnus Egerstedt, Jonathan How, and Dorsa Sadigh (below from left to right).




14 Dec, 12:15-13:15: (MathWorks Special Session) Combining Learning and Control in Cyber-Physical Systems
Date & Time: 14 Dec, 12:15-13:15
Venue: Melati Main 4001AB-4104
Speaker: Prof. Andreas Malikopoulos, Civil and Environmental Engineering, Cornell University

Abstract: Cyber-physical systems (CPS), in most instances, represent systems of subsystems with an informationally decentralized structure. To derive optimal control strategies for such systems, we typically assume an ideal model, e.g., a controlled transition kernel. Such model-based control approaches cannot effectively facilitate optimal solutions with performance guarantees due to the discrepancy between the model and the actual CPS. On the other hand, in most CPS there is a large volume of data of a dynamic nature, which is added to the system gradually in real time and not altogether in advance. Thus, traditional supervised learning approaches cannot always facilitate robust solutions using data derived offline. By contrast, applying reinforcement learning approaches directly to the actual CPS might impose significant implications on the safety and robust operation of the system. In this talk, I will discuss the challenges of supervised learning and model-based control approaches in several real-world CPS applications that have been successfully commercialized using controls, math and optimization, database, code generation and deployment capabilities of MATLAB and Simulink. These applications include self-learning powertrain control, power management control of hybrid electric vehicles, and optimal coordination of connected and automated vehicles. Then, I’ll provide a theoretical framework founded at the intersection of control theory and learning that circumvents these challenges in deriving optimal strategies for CPS. In this framework, we aim to identify a sufficient information state for the CPS that takes values in a time-invariant space and use this information state to derive separated control strategies. Using separated control strategies, we can derive offline the optimal control strategy of the system with respect to the information state, which might not be precisely known due to model uncertainties or the complexity of the system, and then use learning methods to learn the information state online while data are added gradually to the system in real-time. This approach could effectively facilitate optimal solutions with performance guarantees in a wide range of CPS applications, such as emerging mobility systems, networked control systems, smart power grids, cooperative cyber-physical networks, cooperation of robots, and the Internet of Things.
Speaker bio: Andreas Malikopoulos is a Professor in the School of Civil & Environmental Engineering and the Director of the Information and Decision Science Lab at Cornell University. Prior to these appointments, he was the Terri Connor Kelly and John Kelly Career Development Professor in the Department of Mechanical Engineering (2017-2023) and the founding Director of the Sociotechnical Systems Center (2019-2023) at the University of Delaware (UD). Before he joined UD, he was the Alvin M. Weinberg Fellow (2010-2017) in the Energy & Transportation Science Division at Oak Ridge National Laboratory (ORNL), the Deputy Director of the Urban Dynamics Institute (2014-2017) at ORNL, and a Senior Researcher in General Motors Global Research & Development (2008-2010). He received a Diploma from the National Technical University of Athens, Greece, and his M.S. and Ph.D. degrees from the University of Michigan, Ann Arbor, in 2004 and 2008, respectively, all in Mechanical Engineering. His research interests span several fields, including analysis, optimization, and control of cyber-physical systems; decentralized stochastic systems; stochastic scheduling and resource allocation; and learning in complex systems.
15 Dec, 12:15-13:15: Future of work and workers: potential roles for automation and control
Date & Time: 15 Dec, 12:15-13:15
Venue: Simpor-Roselle Ballroom
Chair: Anuradha Annaswamy 
- Keynote by Pramod Khargonekar, University of California, Irvine

- Q&A
Drawing on historical lessons from the industrial revolution, mechanization of agriculture, mass manufacturing, and other similar large-scale changes, there is an ongoing debate about the future of work and workers as ever more powerful automation, machine learning, and artificial intelligence technologies are developed and deployed commercially. This is deeply intertwined with demographic changes. It will be a major driver of our socio-economic future. In this talk, I will provide background information on these issues and likely future scenarios. Next, I will present some thoughts and ideas on the possible roles for the systems and control community in shaping the future through research and education. I will conclude with some open-ended questions. This will set the stage for the discussion session to follow.
