
The 62nd IEEE CDC will be preceded by workshops on Tuesday, December 12, 2023, addressing current and future topics in control systems from experts from academia, research institutes, and industry. The workshops are expected to be delivered in person.
The workshops will be offered based on viable attendance. The 62nd CDC reserves the right to cancel nonviable workshops.
Questions can be directed to the workshop co-chairs, (1) Ben M. Chen ([email protected]), and (2) Andreas A. Malikopoulos ([email protected])
Applications (Closed)
CDC 2023 is committed to being not only the premier venue for the dissemination of work in automatic control but to also provide an environment that is inclusive and supportive to our members. We are aiming to make CDC 2023 a model for other IEEE Societies in diversity, equity, and inclusion, and to create a forum where we broadly reach out to elicit the best scholarship, innovation, and breadth of ideas that our community has to offer. To help us achieve our goals, workshop proposals should include a statement explaining the diversity of the session along dimensions such as gender, geography, industry/academia affiliation and other forms of diversity. We welcome any additional forms of diversity you wish to articulate.
The workshop co-chairs invite your submission of a workshop proposal. A proposal should focus on a specific theme related to the main conference topics, and include:
(1) objectives,
(2) expected outcomes,
(3) expected attendance,
(4) the list of speakers along with their short bio,
(5) a statement explaining the diversity of the session in terms of gender, geography, industry/academia affiliation and other forms of diversity, and
(6) the schedule for a full day workshop (proposals for half-day workshops will not be accepted).
Proposals should be submitted through PaperPlaza. The deadline for the submission is on May 15, 2023.
Floorplan:
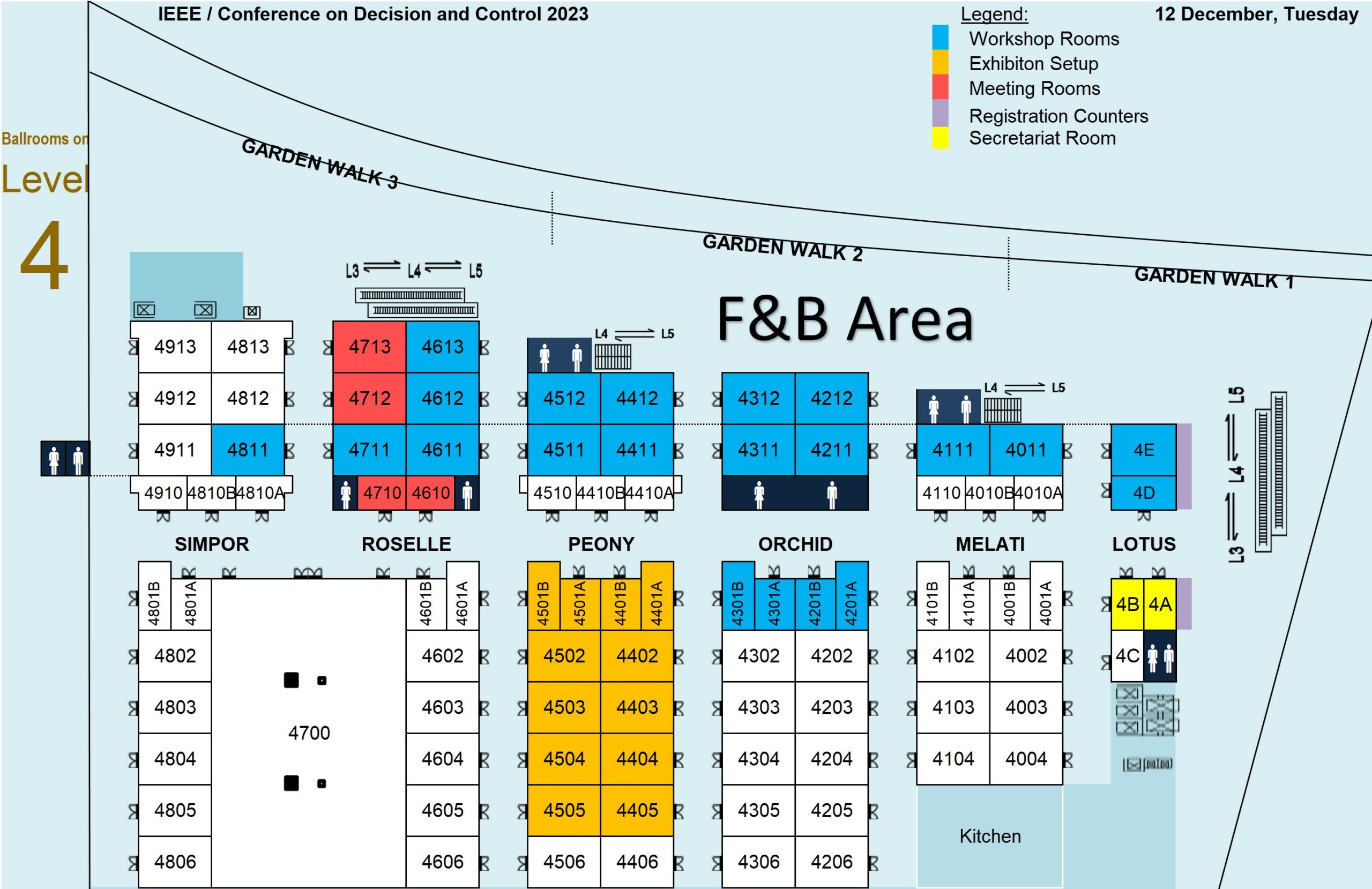
CDC 2023 Workshops
All workshops are full-day ones and will be held in parallel on Tuesday, December 12, 9:00 – 17:30.
Locations:
Workshop | Location |
W01: Semi-Tensor Product of Matrices and Its Applications | Peony Junior 4512 |
W02: Control, Game, and Learning Theory for Security and Privacy | Peony Junior 4511 |
W03: Distributed Control, Optimization and Learning for Multi-agent Systems | Peony Junior 4411-4412 |
W04: Population Games: Strategic Multi-Agent Interactions at Scale | Orchid Junior 4312 |
W05: Modern Adaptive Control and Estimation: From Theory to Applications | Orchid Junior 4311 |
W06: Counter-adversarial inference, control and learning: New Frontiers, Newer Challenges | Roselle Junior 4611 |
W07: Physics-informed Learning for Control and Optimization | Lotus Junior 4DE |
W08: Formal Methods and Decision Making in the Age of AI | Orchid Junior 4211 |
W09: Benchmarking, Reproducibility, and Open-Source Code in Controls | Melati Junior 4111 |
W10: Learning Enabled Control and Coordination for Societally-Aware Transportation Systems | Melati Junior 4011 |
W11: Systems Theory of Ensembles: Fundamentals, Learning, and Applications | Roselle Junior 4612 |
W12: Learning and control for decarbonized energy and transportation systems | Roselle Junior 4613 |
W13: Autonomous Unmanned Systems Technologies and Applications | Orchid Main 4201AB |
W14: Control Barrier Functions: Recent Developments and Future Directions | Orchid Main 4301AB |
W15: Formal Methods in System Resilience: From Analysis to Control | Orchid Junior 4212 |
Workshop by Sponsor: Emerging Challenges of Network-Enabled Control and Optimization | Roselle Junior 4711 |
Workshop by Sponsor: 65 Years of Systems and Control in Shanghai Jiao Tong University: | Simpor Junior 4811 |